Fossil-Imaging Extraterrestrial Rover
In one of my first and favorite Yale classes, Introduction to Mechanical Design, I worked on a team challenge to design an extraterrestrial rover under a $500 budget. We created a rover concept for exploring small Martian caves and transmitting 3D models of fossil samples back to base. The project involved every aspect of mechanical design, from addressing product requirements to design for manufacturability and assembly to computer modeling to prototyping to a final build. Our final rover used a conveyor belt mechanism to collect samples and a 360° imaging system to capture and transmit detailed views of each Mars sample
Problem Definition, Objective, & Constraints
Problem Definition
Current data regarding the existence of life on Mars remains inconclusive, highlighting the need for exploration in environments that are difficult to access, such as caves and narrow crevices. Existing Mars rovers are too large to safely navigate these confined spaces, limiting our ability to study potentially life-supporting environments. As environmental conditions on Earth continue to decline, the urgency to understand extraterrestrial habitability has increased.
Objective
Design and develop a small-scale extraterrestrial rover to:
Navigate confined spaces
Traverse uneven terrain
Collect, transport, and deposit samples
Capture and transmit imaging data
Constraints
Maximum mass: 2.66 kg
Maximum volume: 2000 cm³
Maximum budget: $500
Initial Design Process
Our design process followed a systematic engineering approach, beginning with:
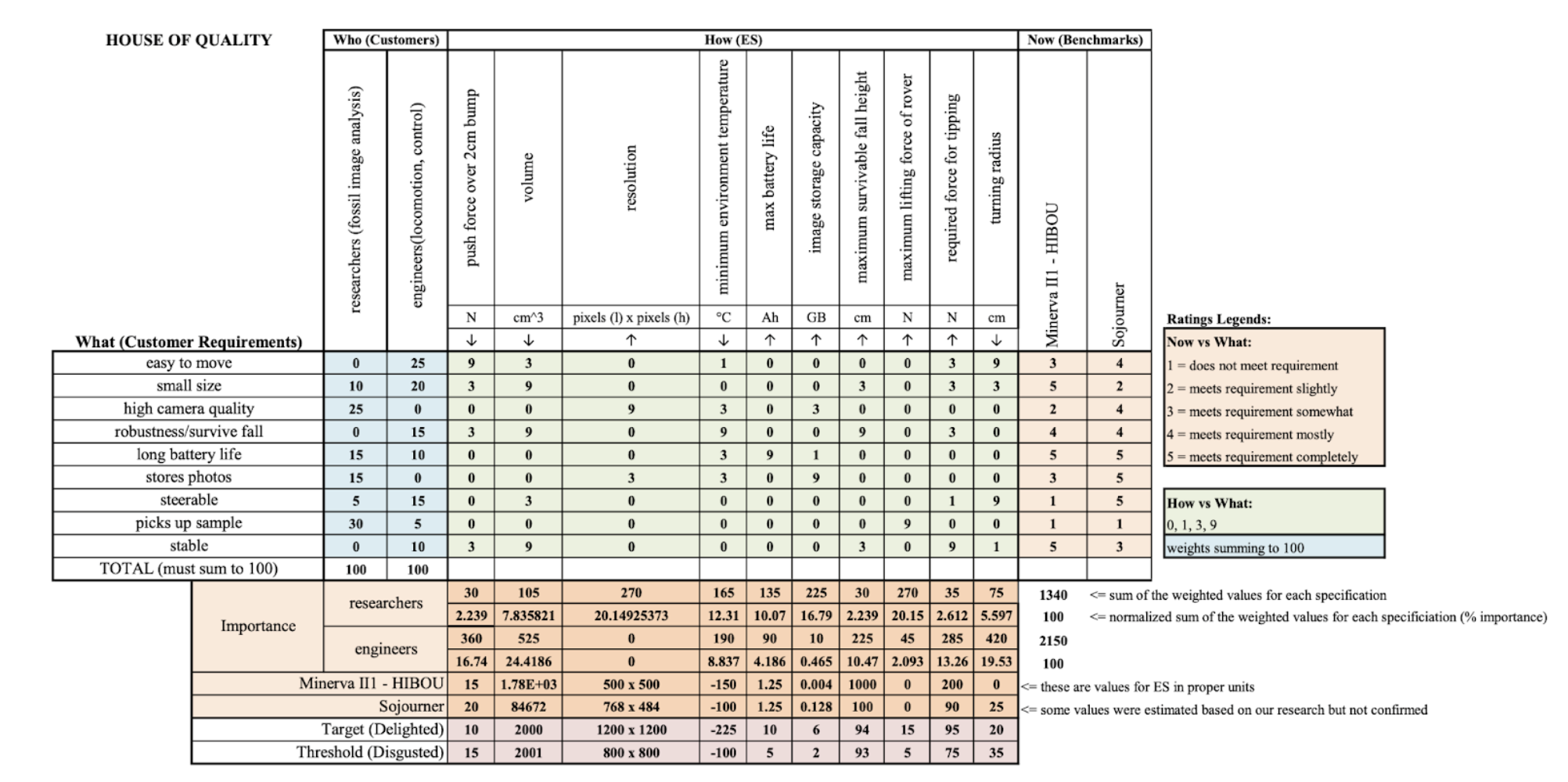
House of Quality — translated customer needs into engineering specifications
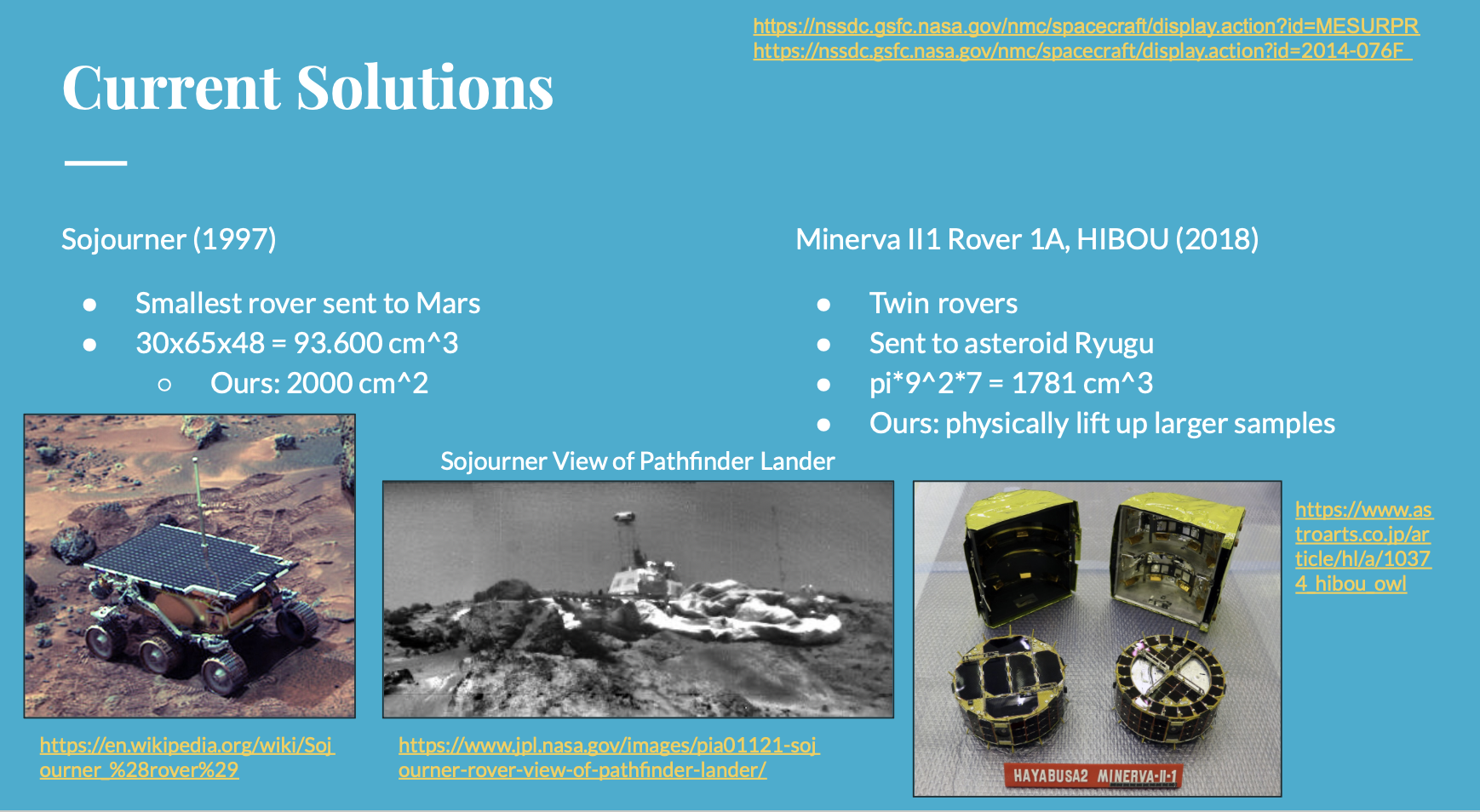
Competitor and benchmark analysis — evaluated existing solutions and identified performance limitations
Functional decomposition — divided the system into key subsystems and requirements
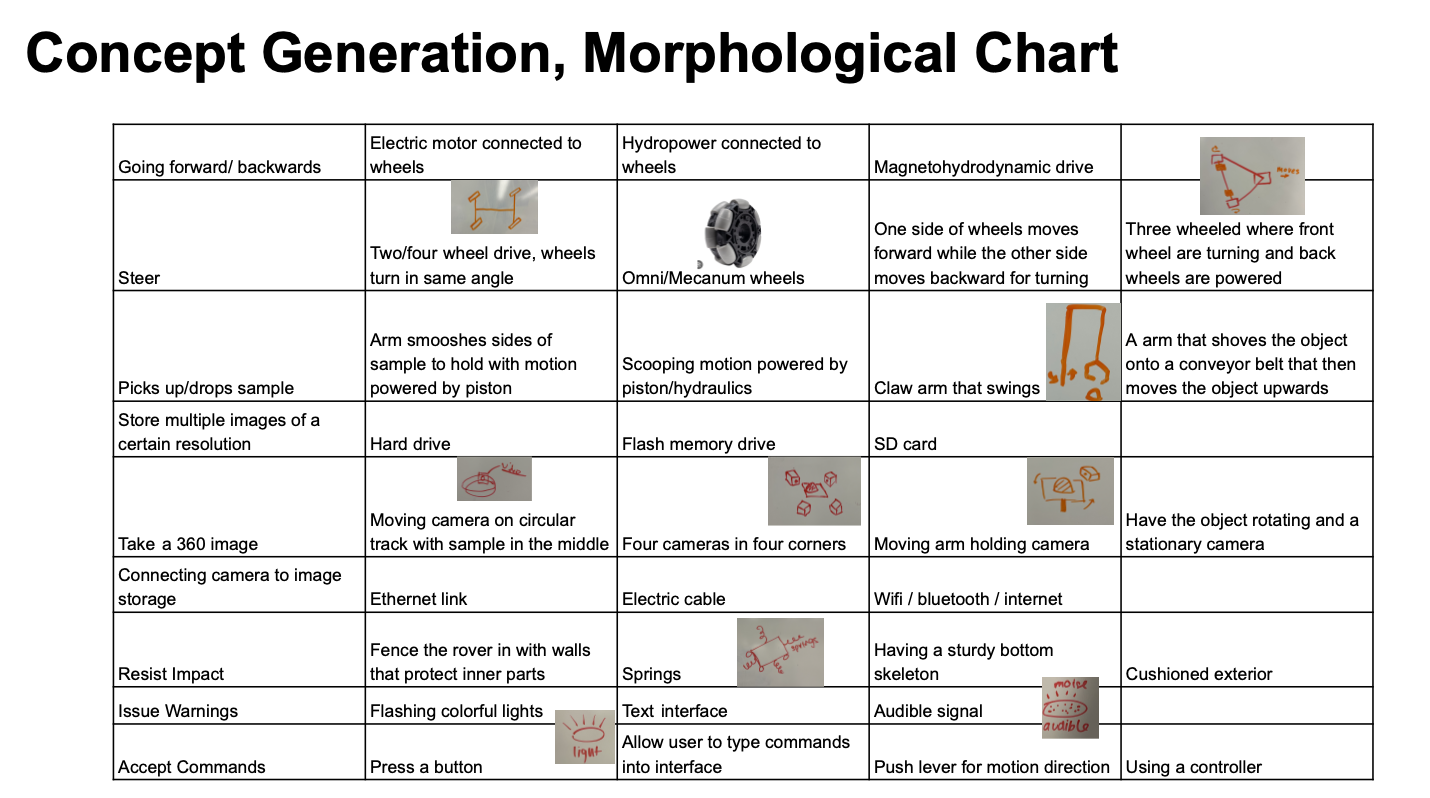
Concept generation and evaluation (morphological chart) — explored multiple design solutions and evaluated them based on performance, feasibility, and constraints
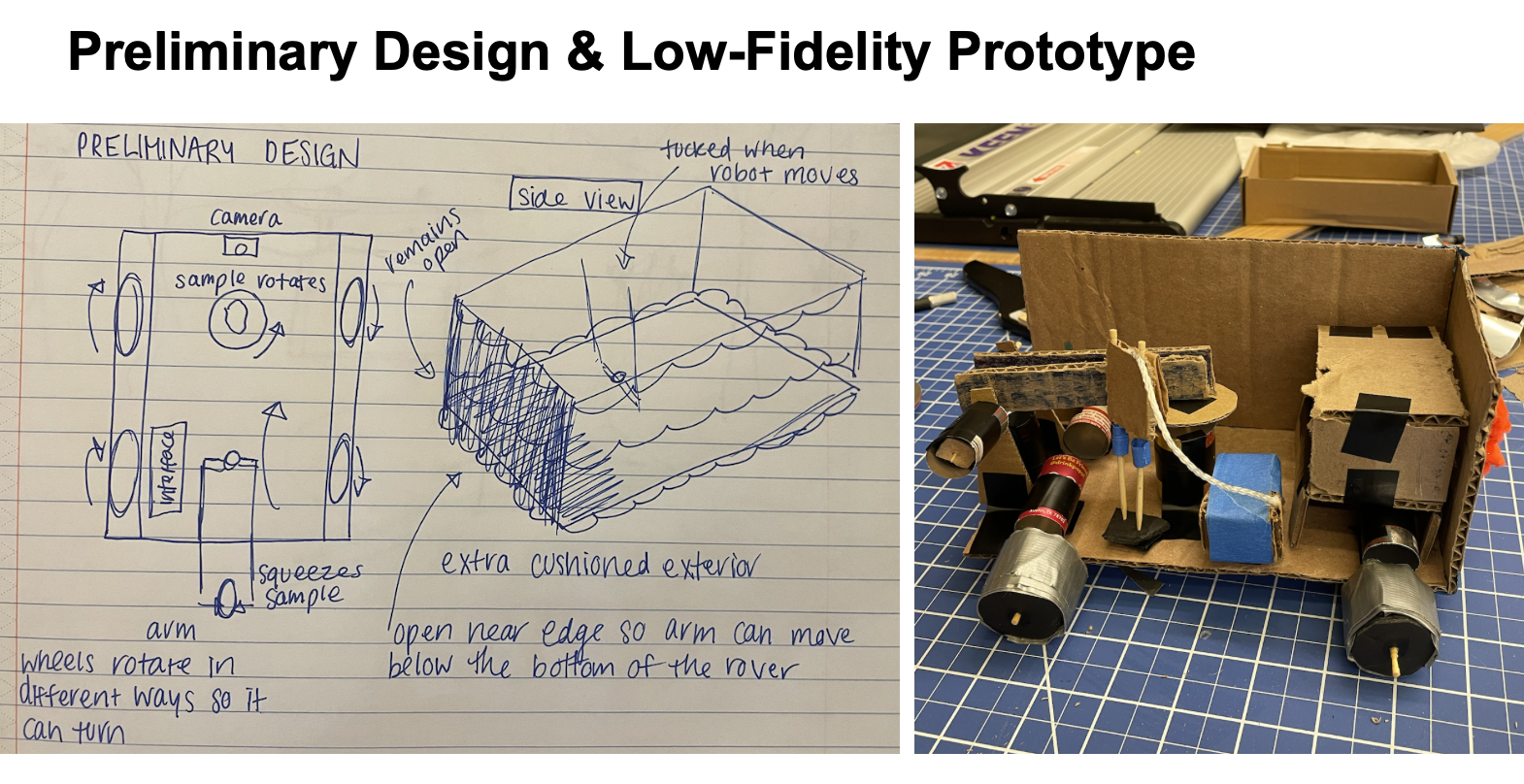
Preliminary design — integrated selected subsystem concepts into a cohesive system design
Low-fidelity prototype — validated core functionality
Project management and scheduling (Gantt chart) — ensured project completion within time constraints
Final Design & FMEA
We divided the overall design into four primary sub-tasks: locomotion, sample acquisition, imaging, and rover protection. To evaluate potential risks and improve system reliability, we conducted a Failure Modes and Effects Analysis (FMEA) to identify possible points of failure within each subsystem, assess their impact on overall performance, and prioritize design improvements. In parallel, we developed detailed CAD models using SolidWorks to visualize the full system and individual components, ensure proper fit and integration between subsystems, and validate design feasibility prior to fabrication. The CAD modeling process enabled iterative refinement of the design, supported informed engineering decisions, and contributed to a more robust and functional final rover system.

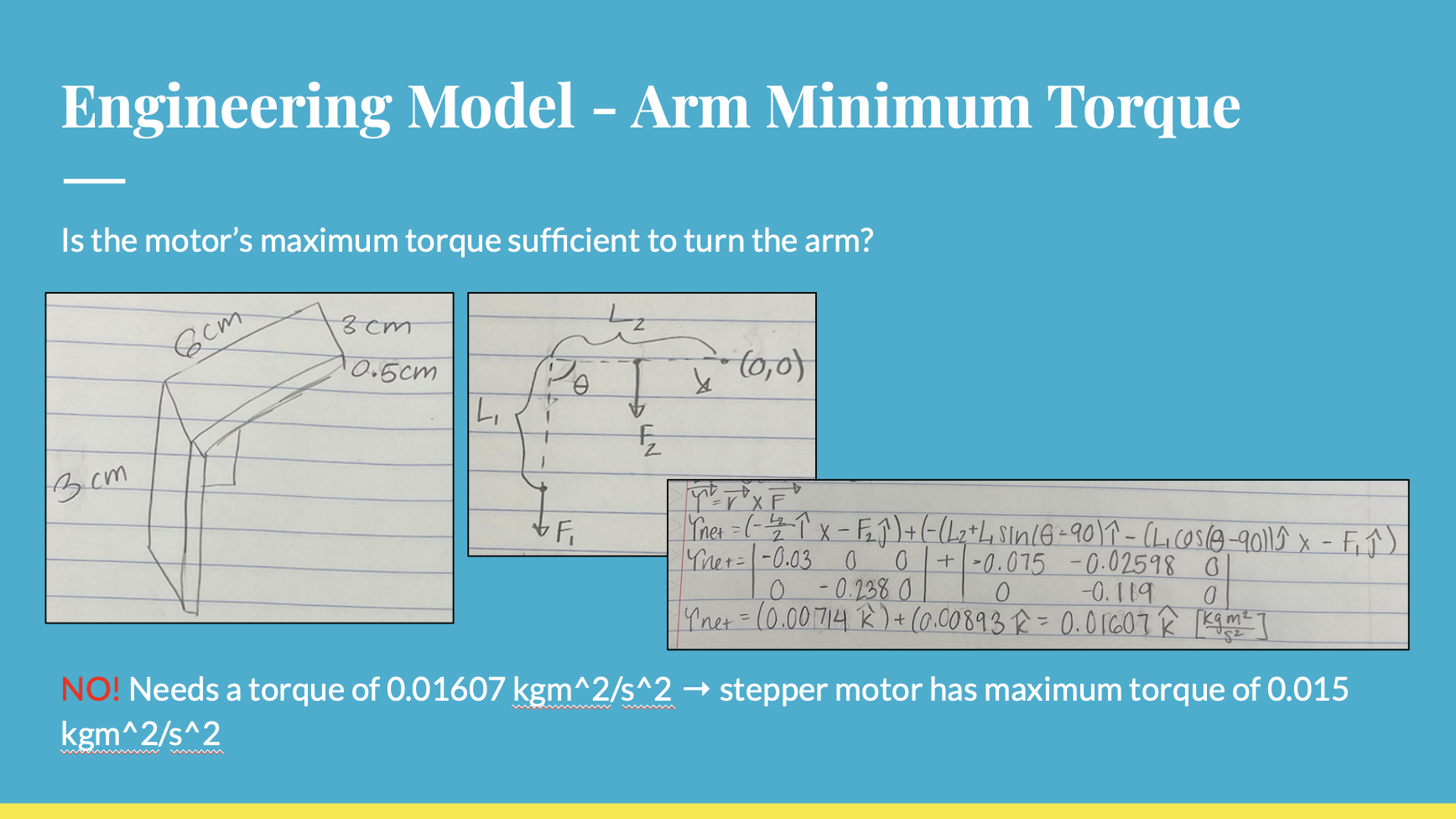
Picking Up Sample
Outer Structure
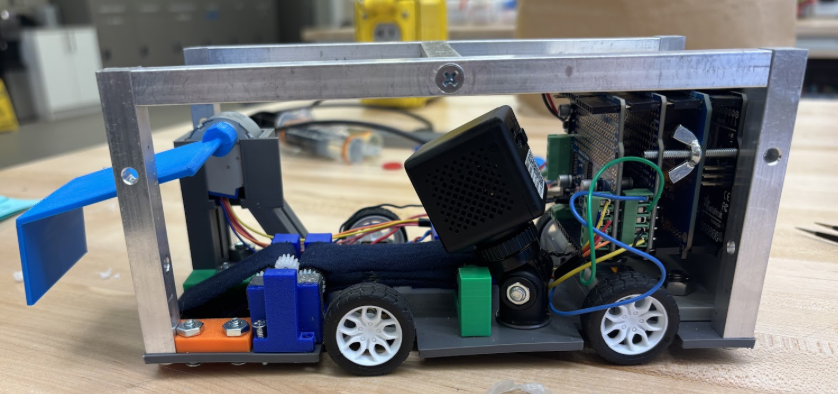
Final Assembly
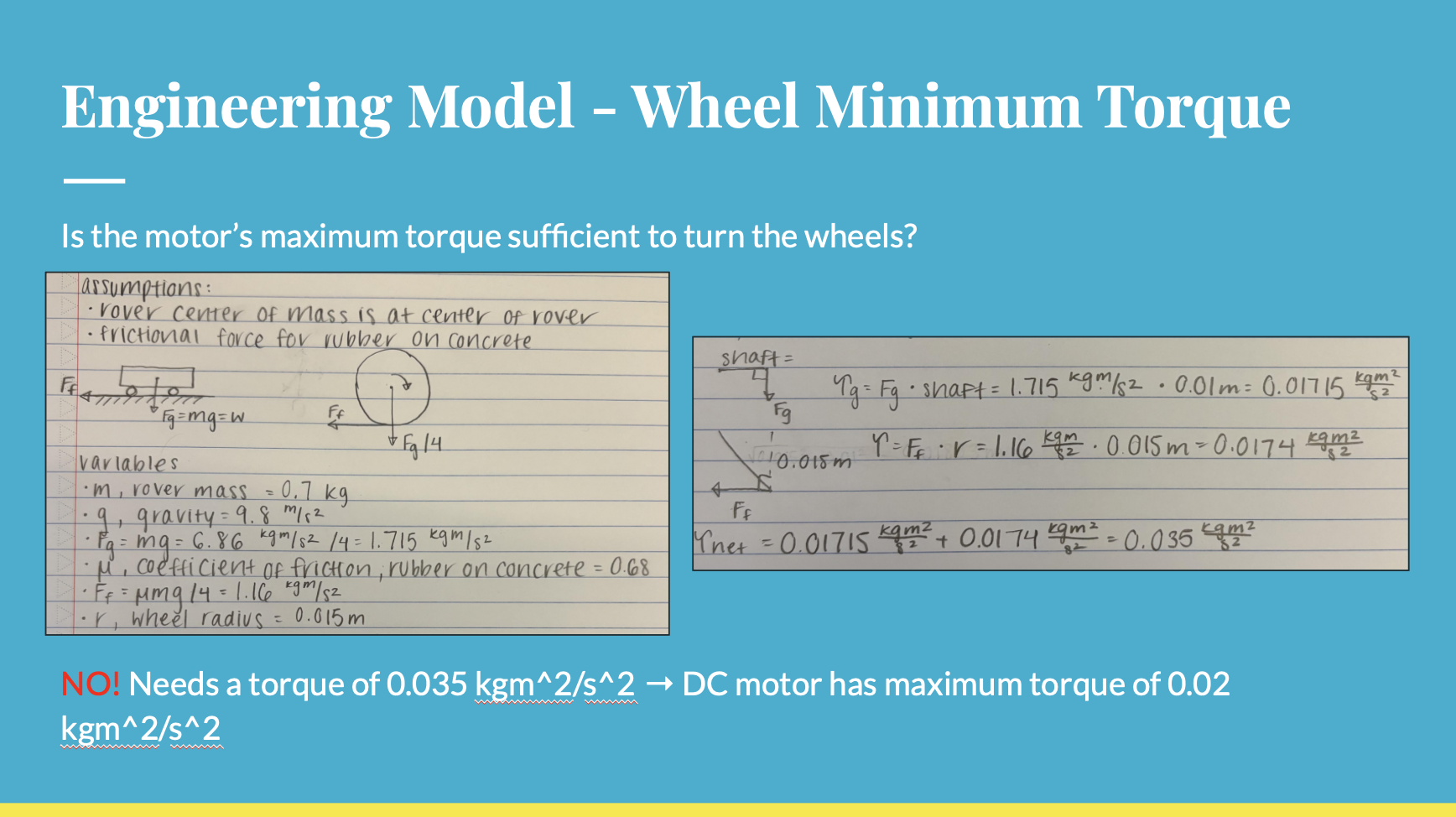
Locomotion
Imaging System
It all begins with an idea. Maybe you want to launch a business. Maybe you want to turn a hobby into something more. Or maybe you have a creative project to share with the world. Whatever it is, the way you tell your story online can make all the difference.
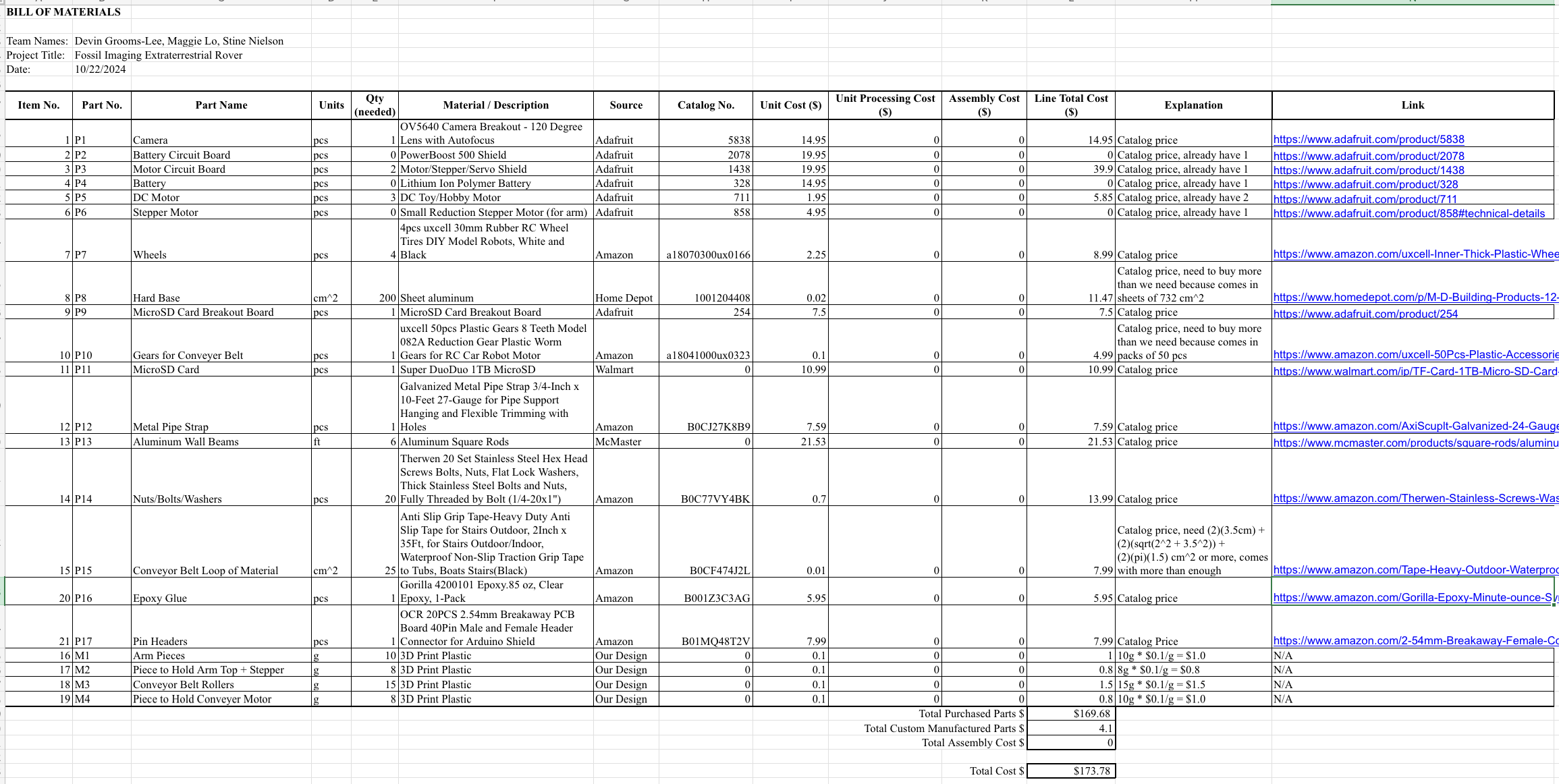
Materials
Reflections and Future Recommendations
For future projects, testing with repeatability is recommended to more thoroughly ensure system reliability and consistency. Additional improvements include incorporating larger wheels to increase ground clearance and enable travel across a wider range of terrains. Greater emphasis should also be placed on FMEA to improve design accuracy and proactively identify potential issues. Creating a more detailed project timeline or Gantt chart would help strengthen project management and ensure deadlines are met. Finally, for the rover project specifically, upgrading the electronics to a system capable of supporting the originally intended remote data collection method (rather than relying on wireless communication) would significantly improve overall system performance.